อุตสาหกรรมการเกษตรกำลังเผชิญหน้ากับความท้าทายจากความเปลี่ยนแปลงอย่างรวดเร็วทั้งสภาพอากาศที่ไม่แน่นอน (Climate Change) ปัญหาการขาดแคลนแรงงาน แรงงานสูงวัย และต้นทุนการผลิตที่สูงขึ้น เกษตรกรต้องพัฒนาศักยภาพในการทำการเกษตรให้มีประสิทธิภาพสูงขึ้น เพื่อเพิ่มผลผลิตควบคู่กับการลดต้นทุนการผลิต โดยใช้ทรัพยากรที่มีอยู่จำกัดอย่างคุ้มค่า และมีประโยชน์สูงสุดโดยไม่ทำลายสิ่งแวดล้อม
ในอดีตกิจกรรมในไร่อ้อย เช่น การปรับระดับพื้นที่ การควบคุมระยะปลูกให้มีคุณภาพ การใส่ปุ๋ยให้เหมาะสมกับสภาพดิน เป็นงานที่ต้องอาศัยทักษะความชำนาญ และมีต้นทุนสูง ซึ่งปัจจุบันเทคโนโลยีเกษตรแม่นยำได้เข้ามามีบทบาทเพื่อช่วยให้เกษตรกรทำงานได้รวดเร็วขึ้น
ระบบเกษตรแม่นยำสำหรับไร่อ้อยที่ได้พัฒนาขึ้นโดยใช้ระบบนำทางด้วยดาวเทียม (GNSS-Global Navigation Satellite System) ควบคู่กับระบบสารสนเทศภูมิศาสตร์ (GIS-Geographic Information System) ในการควบคุมการทำงานของเครื่องจักรโดยใช้พิกัดอ้างอิงจากดาวเทียม เพื่อเพิ่มประสิทธิภาพในการบริหารจัดการและการวางแผน การทำแผนที่และออกแบบแปลง การเก็บตัวอย่างดินและทำแผนที่ การควบคุมเครื่องจักรและตรวจสอบคุณภาพการทำงาน การปรับอัตราปุ๋ยให้เหมาะสมกับสภาพพื้นที่ การให้น้ำตามความชื้นของดินและความต้องการของพืช และทำแผนที่ผลผลิต เป็นต้น
หลักการทำงาน
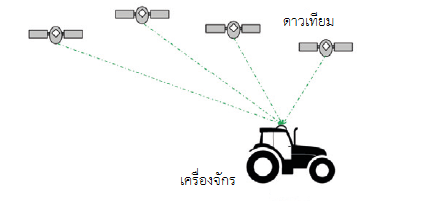
ดาวเทียมที่โคจรรอบโลกกระจายสัญญาณวิทยุระบุตำแหน่ง สถานะ เวลาของดาวเทียม สัญญาณดาวเทียมเดินทางในอวกาศด้วยความเร็วมากกว่า 299,000 กิโลเมตร/วินาที เครื่องรองรับสัญญาณดาวเทียมที่เครื่องจักรรับสัญญาณวิทยุและคำนวณระยะห่างจากดาวเทียมโดยจะต้องรับสัญญาณจากดาวเทียมอย่างน้อย 4 ดวง เพื่อคำนวณพิกัดแบบสามมิติ
ระดับความแม่นยำ
ระดับความแม่นยำของการระบุตำแหน่งด้วยสัญญาณดาวเทียมขึ้นอยู่กับหลายปัจจัย เช่น สภาพอากาศ ความคลาดเคลื่อนนาฬิกา คุณภาพของเครื่องรับสัญญาณ ตัวอย่างเช่น ตำแหน่งโทรศัพท์มือถืออาจคลาดเคลื่อนในรัศมี 5 เมตร ถ้าใช้งานในสภาพอากาศเปิดไม่มีสิ่งกีดขวาง แต่หากใช้ในบริเวณอาคารอาจทำให้ระดับความคลาดเคลื่อนสูงขึ้น เป็นต้น
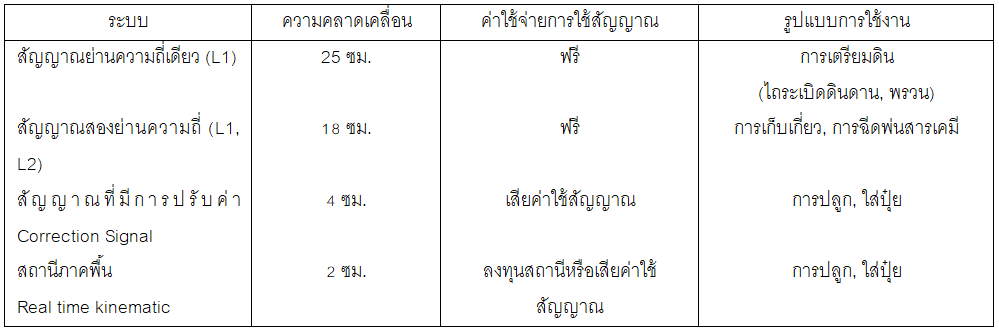
ระบบควบคุมเครื่องจักรกลการเกษตรต้องการระดับความแม่นยำที่สูงในการทำงาน ต้องใช้อุปกรณ์ที่มีคุณภาพการรับสัญญาณและการประมวลผลที่ดีขึ้น จึงอาจทำให้มีราคาที่สูงกว่าอุปกรณ์ที่ใช้ตามท้องตลาดทั่วไป ซึ่งสามารถแบ่งระดับความคลาดเคลื่อนและรูปแบบการใช้งานเป็น 4 ระดับ ดังนี้
ส่วนประกอบ
1. อุปกรณ์ที่ติดตั้งบน รถแทรกเตอร์หรือเครื่องจักร
1.1 หน้าจอและเสารับสัญญาณดาวเทียม ทำหน้าที่รับข้อมูลจากสัญญาณดาวเทียมเพื่อประมวลผลแสดงตำแหน่งและทิศทางที่ รถแทรกเตอร์เคลื่อนที่ กำหนดรูปแบบการทำงาน เช่น การสร้างขอบเขตแปลงและคำนวณพื้นที่ การกำหนดระยะห่างแนวปลูก ผู้ใช้สามารถบันทึกข้อมูลเพื่อใช้ในการทำงานขั้นตอนต่อไปได้
1.2 ระบบควบคุมทิศทางการเคลื่อนที่ ทำหน้าที่ควบคุมทิศทางการเคลื่อนที่ของ รถแทรกเตอร์อัตโนมัติ เช่น เคลื่อนที่เป็นแนวเส้นตรง เป็นแนวเส้นโค้ง หรือเป็นแนววงกลม ระยะห่างระหว่างแถวปลูกสม่ำเสมอ สามารถใช้ประโยชน์จากพื้นที่สูงสุด ช่วยให้ผู้ใช้ทำงานสะดวกสบายอย่างมีคุณภาพ อีกทั้งยังช่วยขยายเวลาการทำงานต่อวันได้มากขึ้น เช่น การทำงานในช่วงเวลารุ่งสางหรือพลบค่ำ
2. สถานีภาคพื้นดิน RTK-Real Time Kinematic
สถานีภาคพื้นดินทำหน้าที่รับสัญญาณดาวเทียมแบบจลน์ได้ค่าพิกัดทันที ณ เวลาทำการรังวัดซึ่งมีตำแหน่งคงที่ รถแทรกเตอร์หรือเครื่องจักรจะรับสัญญาณสถานีภาคพื้นดินระบุตำแหน่งคงที่พร้อมกับสัญญาณดาวเทียม แล้วนำมาคำนวณพิกัดที่มีความแม่นยำสูง
3. โปรแกรมการออกแบบและการจัดการ
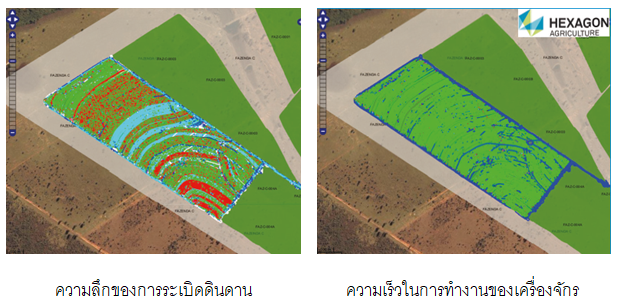
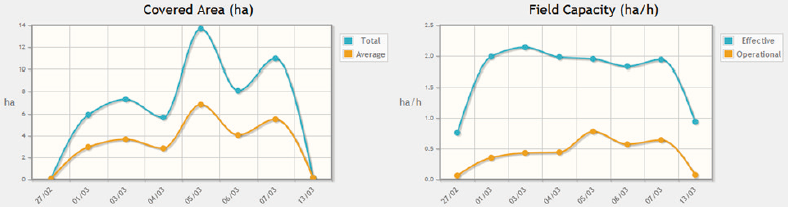
ประโยชน์ที่สำคัญของการใช้งานระบบนำทางด้วยดาวเทียมนอกจากการควบคุมเครื่องจักรกลในไร่ คือ การนำข้อมูลมาใช้ในการประเมินและวิเคราะห์คุณภาพการทำงาน เพื่อการวางแผนและบริหารจัดการเครื่องจักรกลให้มีประสิทธิภาพสูงสุด